




Robotic Arms
All Air currently offers two models of RealMan robotic arms, which can satisfy the needs of users with varying degrees of freedom, arm spans and force sensing capabilities. These industrial robotic arms are lightweight and have a high load-to-weight ratio. The ultra-small footprint, coupled with a multi-platform interface system, and integrated controller makes it suitable for a wide range of robot and cobot application scenarios. These units also have expansion interfaces and secondary development packages to create a wealth of opportunities for personalization.
Advanced control algorithms enable RealMan robotic arms to have functions such as drag teaching and collision stopping. The powerful expansion ability and wireless communication capabilities of the robotic arm enable control of the optional mobile chassis and end-of-arm tools through its own built-in controller, creating unmatched versatility.
RealMan integrates advanced software and hardware with human-machine interaction technology to provide customers with high-performance, high-reliability, and simple-to-use ultra-lightweight humanoid robotic arms and integrated solutions.

Product Lineup
ECO65-AA
only
$12,100.00
All Air Exclusive! Includes EG2-SF16 Gripper!
6-DOF Ultra-lightweight Humanoid Robotic Arm
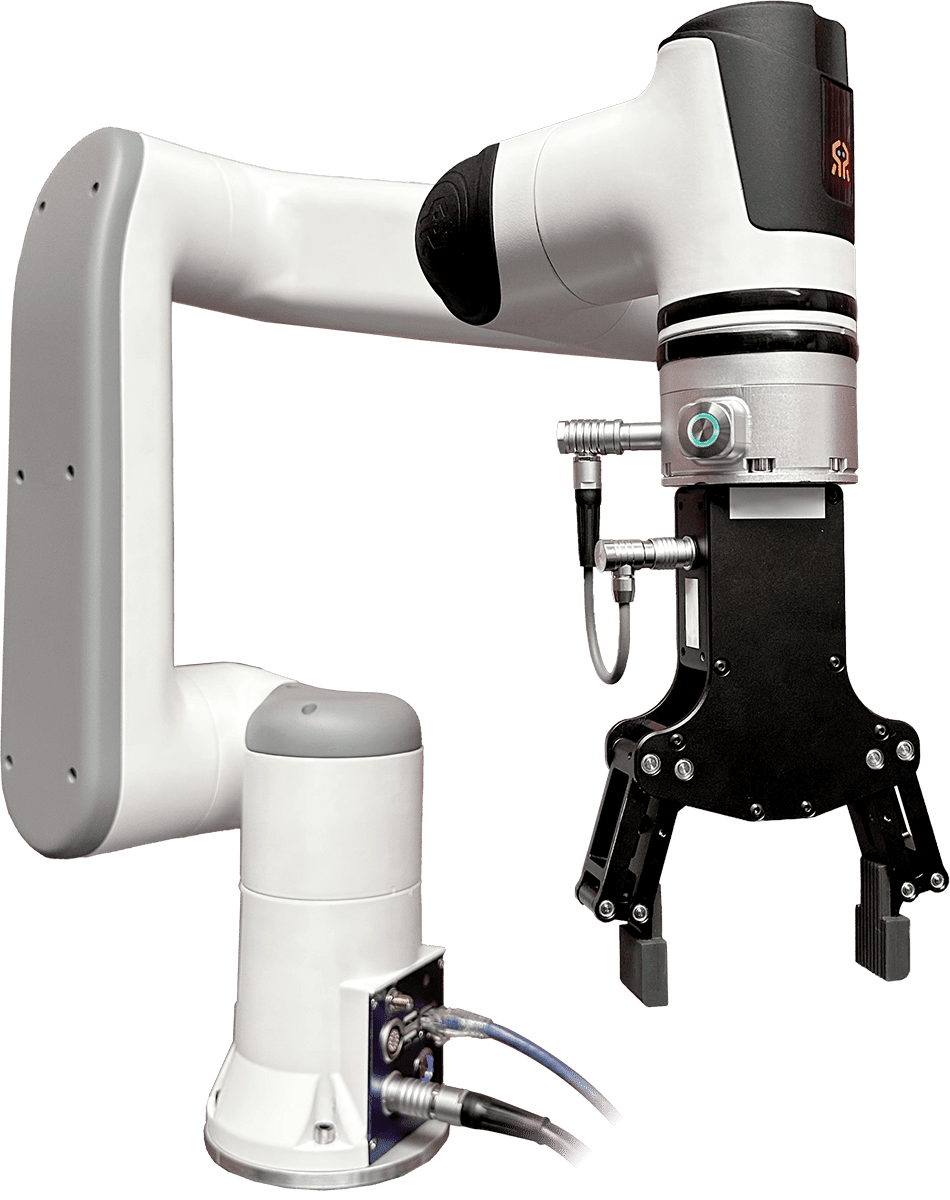
The ECO65-AA is a six-degree-of-freedom standard robotic arm. It can perform precise and versatile tasks in industrial settings with its six degrees of freedom, allowing for complex movements. It is ideal for collaborative robot (cobot) applications, including assembly, packaging, material handling, and more, thanks to collision detection, high payload capacity, repeatability, and various control modes such as drag and drop teaching and API/JSON interfaces. The integrated robotic arm and controller have a total weight of 7.8kg, with an effective payload of up to 5kg. A repeat positioning accuracy of ±0.05mm and a working radius of 610mm make this unit an excellent candidate for cobot applications and other industrial uses.
- Degrees of freedom: 6
- Payload: 5kg
- Weight: 7.8kg (8.03kg w/Gripper)
- Repeatability: ±0.05mm
- Working radius: 610mm
- Power supply voltage: DC20~30V,DC24V
- Power Consumption: Max Power Consumption 200W Comprehensive power consumption 100W
- IP Grade: IP54 (robotic arm body)
- Materials: Aluminum alloy +ABS
- Controller: Integrated
- Communication modes: WIFI/network interface/Bluetooth/USB serial port/RS485
- Control modes: Drag and drop teaching/Teaching pendant/API/JSON
- Joint motion range: J1 ±178°, J2 ±135°~178°, J3 ±145°~160°, J4 ±178°, J5 ±178°, J6 ±360°
- Maximum speed: J1-J2 180°/s, J3-J6 225°/s
ECO65-AA+
only
$16,825.00
All Air Exclusive! Includes EG2-SF16 Gripper!
6-DOF Ultra-lightweight Humanoid Robotic Arm
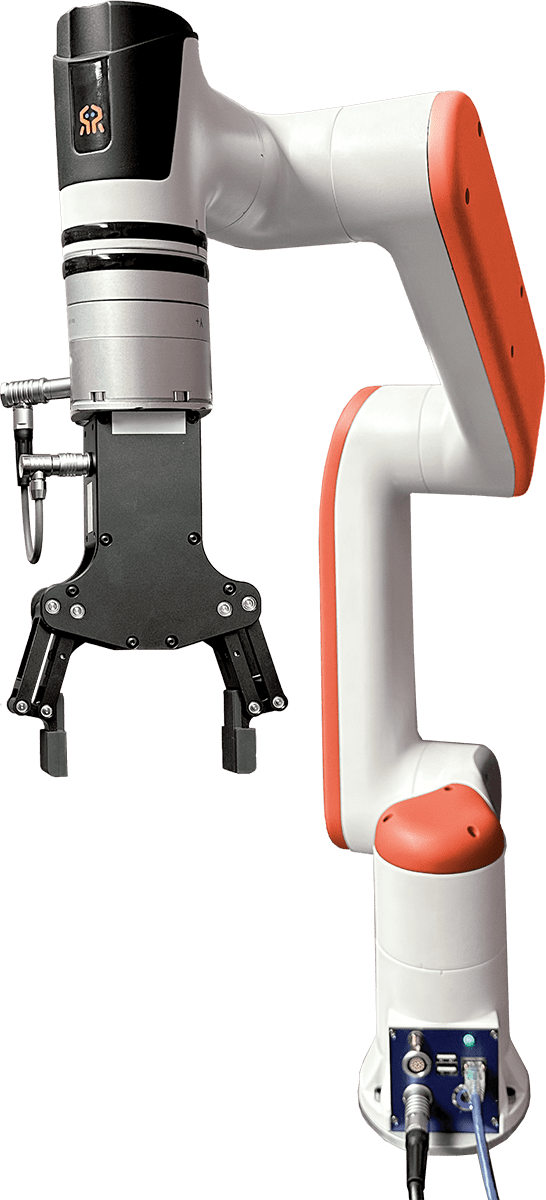
This model has all of the great features of the standard model, plus a larger working radius and a six-axis force detector for highly sensitive end-effector applications!
The ECO65-AA+ is similar to the ECO65-AA, but the integration of six-axis force gives this model even greater versatility. This capability allows the ECO65-AA+ to perform tasks that require delicate handling and precise force control, such as assembly operations, polishing, and complex manipulation tasks that the ECO65-AA cannot perform with the same level of finesse. With a total weight of 7.9kg, an effective payload of 5kg and a peak load capacity of up to 9kg, this heavy duty unit excels at many industrial tasks.
- Degrees of freedom: 6
- Payload: 5kg
- Weight: 7.9kg (8.13kg w/Gripper)
- Working radius: 638.5mm
- Power supply voltage: DC20~30V,DC24V
- Power Consumption: Max Power Consumption 200W Comprehensive power consumption 100W
- IP Grade: IP54 (robotic arm body)
- Materials: Aluminum alloy +ABS
- Controller: Integrated
- Communication modes: WIFI/network interface/Bluetooth/USB serial port/RS485
- Control modes: Drag and drop teaching/Teaching pendant/API/JSON
- Joint motion range: J1 ±178°, J2 ±135°~178°, J3 ±145°~160°, J4 ±178°, J5 ±178°, J6 ±360°
- Maximum speed: J1-J2 180°/s, J3-J6 225°/s
- Six-axis force range: 200N/7Nm
- Six-axis force accuracy: ≤0.1%FS
Accessories

RealMan offers various tools, sensors, and modules that seamlessly integrate with your existing system, allowing you to add new functionalities and tackle a diverse array of tasks. These high-quality, innovative robot accessories ensure that your robotic solutions remain adaptable and efficient, enabling you to meet evolving demands with ease. Enhance your robot’s performance and flexibility with an array of end tools including cups, grippers and hands; as well as sensors and chassis to give your robot new capabilities.
more info…


RealMan Product Features:
Ultra-High Load-to-Self Weight Ratio: Ultra-light body, with the weight of the standard robotic arm (including controller) being only 7.2 Kg, payload up to 5 Kg, peak load of 9 Kg (full arm span), 1:1.44 load-to-weight ratio, and an effective working radius of up to 610 mm.
Flexible Deployment: Ultra-small volume, with a maximum robotic arm diameter of 11.5 cm and a base installation diameter of 11 cm. The size of humanoid robotic arm greatly reduces the installation space requirements, making it more convenient and flexible.
Integrated Modularization: Integrated and modular design, easier disassembly and assembly, lower maintenance costs, and higher efficiency.
Integrated Controller: No traditional control cabinet, perfectly integrating the controller with the robotic arm.
Ultra-High Compatibility: The end offers a general interface that is expandable and plug-and-play. The integrated robotic arm has rich interfaces to meet the expansion of application needs in a variety of industries.
Ultra-Low Power: DC power supply of 20 to 30 V, suitable for mobile power supply, with a maximum power consumption of ≤ 200W and a comprehensive power consumption of ≤ 100W under full load and can be applied in various scenarios.
Safe and Sensitive: Sensitive drag and drop programming, which can fully reproduce the drag trajectory; The protection level can be set, and the robotic arm will stop immediately when the collision reaches the maximum torque limit, thereby avoiding injury to personnel or equipment.
Open System: Open API function library, supporting C/C++/C #/Python programming language, and supporting Windows/Linux/ROS robot operating systems and various communication protocols.
Wireless and Convenient Connection: Connection and control of the robotic arm by wired and wireless means, easy and quick switching, and liberation from the limits of control cables